Hey diamonds, I actually made it to my second event in as many months! Who am I and what have I done with me?

Anyway, Antweight World Series (AWS) have been a staple of UK combat since the early 00’s and are pretty much the event for 150g antweights. When I was starting out they were in the late 20’s and now we’re up to… AWS 64?!
Well bugger me, if it isn’t the relentless march of time and progress ruining my stagnant worldview ONCE AGAIN. Rude.
As this event was broadly local (hour and change) with the venue provided by my good friend and entrepreneur Mr Baker I made some arrangements and slapped together a team. For those not in the know, AWS rules allow a maximum of 4 entries per team, 3 rollers (wheels or tracks) with the 4th slot only able to be used for walking robots or clusterbots. Due to the UK scene liking a bit of fun and being generally pretty agreeable there is a fairly liberal definition of what counts as a walker and cam based shufflers are A-Okay to attain that slot and a hefty weight bonus to boot. They can weigh upto 225g, though they are restricted to the cube as normal. This works really quite well and to date has not been abused.

My team was headed up by a reimagining of my old faithful “Loader” which took the general shape, smell and feel and dragged it along to more modern times. ReLoader is a tracked 4 bar lifter that runs an odd asymmetrical drive system of 3 custom ‘n5’ gearmotors of my own horrific homebrew design. These are juiced up with a 3 cell lithium tumour lumped in the corner of a printed ABS monocoque chassis with a BBB esc and servo doing the, ahem, heavy lifting.

For those of you particularly entranced by anaemic mumbling I have a video uploaded to youtube which shows a bit more of the setup of ReLoader in cursory detail with much poking and gesturing.

Second on the block is Sad Ken, a horizontal bar spinner in the vein of Carbide, Decimator, Daedalus and so on. This came about from rattling around the parts bins and finding a steel bar lovingly handcrafted by your friend and mine, Mr James Blunden. I found a motor that it fit on surprisingly well and the rest of the robot was formed around the generic shape that these robots tend to take (An Triangle).

I wanted to keep the chassis as simple and brutal as I could so it genuinely is just a block with a smattering of loose geometry and a rough application of engineering principals. The drive motors just press in through the sides and are wired into a Malenki Nano ESC tucked deep down in a little bracket on the baseplate. On top of this rests a 180mah 2s Lipo battery. I resist the urge to go higher voltage with spinners as while the ancient robot building texts do state that “More Volts More Better” I feel it gets towards diminishing returns with directly driven antweight systems.

The bar was attached with an extremely inappropriate amount of relatively decent epoxy to a small hobbyking motor. To save space in the body and not have the robot become ungainly or ill proportioned I stuck the weapon ESC in a little snug directly under the path of the bar. If you’re not living dangerously, are you really living?

So as not to rely totally on cantilevered 3d printed plastic to hold a rotating death bar I added in a brace which would clip in under the chassis and hold a flanged ball bearing to support the motor and keep the whole assembly stiff.

These were cut out by CNC by Lewis Irvine and they looked fantastic! Unfortunately they didn’t arrive in time so I had to make do with a printed part - better than nothing but not a patch on the carbon.

More or less on a whim I pulled together my third rolling entry, HobGoblet. Finding an old aluminium beater I milled for the hell of it many moons ago and the corresponding motor was the spark of inspiration I needed to make the most generic robot possible. The name and colouring is an obvious callback to my Robot Wars entry, Hobgoblin.

What do I mean generic? Well if this was a beetle it would be two a penny quite frankly. Not that there's anything wrong with the style of robot, nor am I trying to gatekeep because they keep winning things but I own a pair of working fucking eyes and can’t help but see the trend. 2wd drums and beaters are relentlessly successful, looking at the Weta’s, the 722’s and almost every use of a fingertech beater you can see why. Heck, even GobHoblin itself very nearly got built in this style because it works!

Construction is my unofficial signature at the moment, a huge block of ABS with lots of nooks for components to nestle down in. I figured keeping it to a monocoque again would limit the chance of Critical Existence Failure happening to bulkheads and the like as this sort of problem would spill the guts out very quickly.

The insides are fairly pedestrian and aside from some classic back alley lithium neurosurgery there isn’t anything too dodgy going on inside. Two 150mah (amusingly they have 180mah stamped on the cells under the sticker stating 150mah) lipo cells are slung out back behind some old 30:1 N20 motors. These are a good 50% faster than my normal selection of drive motor but I took the chance on speed to help the beater engage. I had to dull the turning quite severely with dual rates so it wasn’t constantly tweaking out. It’s driven by a Malenki Nano. The motor in the beater is an old HK multistar driven by a no name Blheli 15a brushless which was wrapped up into one unit. The width of the package was the internal height of the frame, so the lid has a bit of a hunchback to give everything some clearance. I completely own how shit a solution this is but it works quite nicely from an aesthetic perspective. Fun(ish) Fact(ish): the working title for Hobgoblin was Hunchback! I changed it mostly because I find goblins in any form really entertaining and partially because it didn’t feel completely kosher to be using a fairly derogatory term for a medical condition as a name for a shit robot.
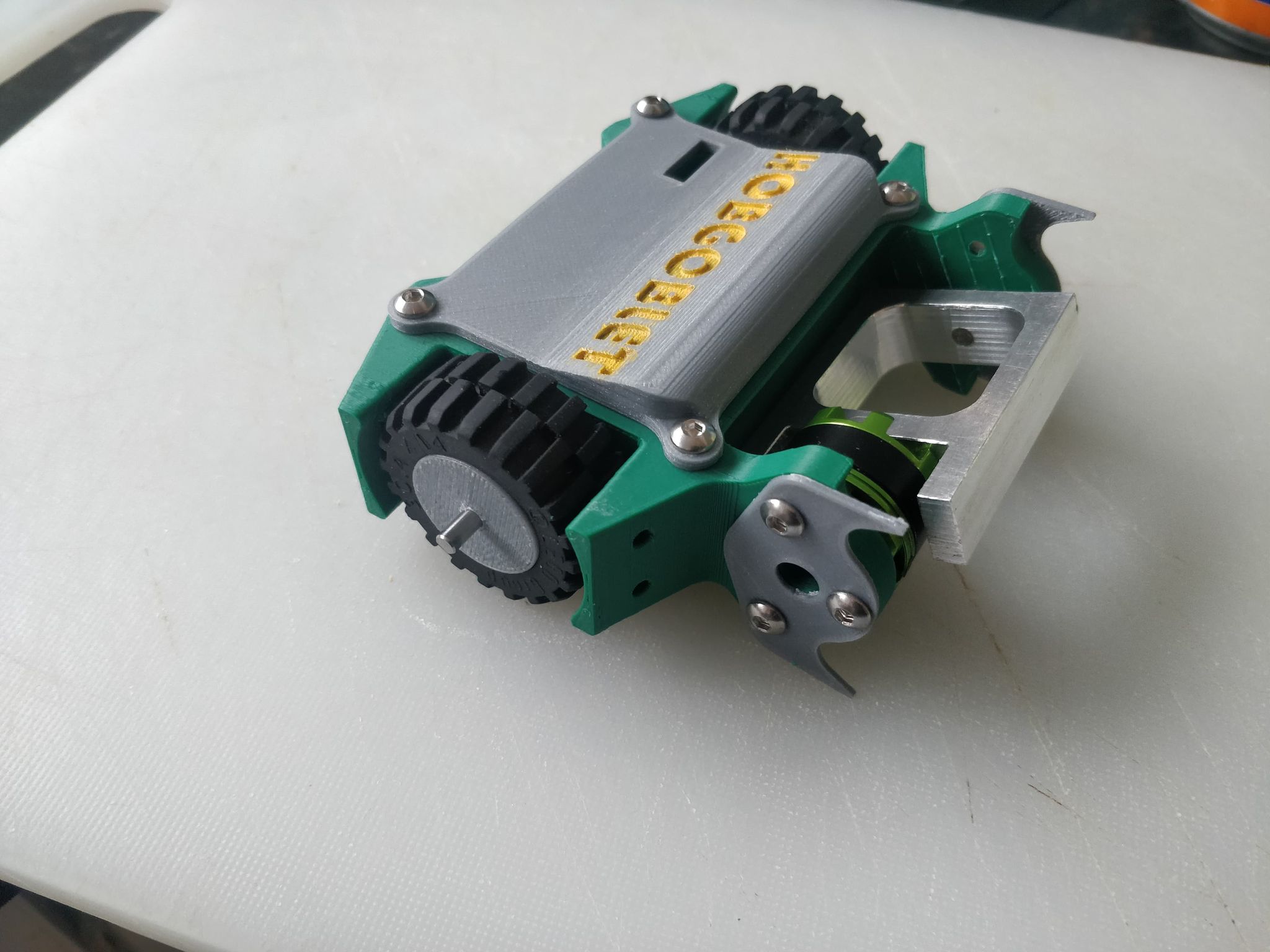
It also has printed forky bits to try and get under people the best I can. If I hadn’t designed and built this the weekend before the event I would have had them lasercut from steel. I just printed lots of spares expecting to have them nuked every fight - and I was kind of right!
Hobbling up the rear is Shakma! My walking vertical saw blade nightmare. The blade is a HSS slitting saw which sits on a printed hub sat over a 21mm SK3 outrunner I have had in my empire of junk for a good few years now. While not the most effective as a spinning weapon, sawblades just look fucking tight and this style is agressive enough that it might just be on the cusp of effectiveness.

The walking mechanism is as simple as it is jerky, which is to say ‘painfully’. It is cam based as anyone can see which can be done very smoothly with multiple cams and legs. Two is basically the bare minimum to have it mobile but you’re losing a lot of energy in jiggling and shaking rather than just translating around the arena. If you want a great example, look up Peter Waller's walkers. They practically glide about with the steadiness of a waiter in a crisp white shirt balancing a brimming pitcher of sangria and an extra large bowl of pea soup.
There were absolutely no concerns about weight on this one, and even without any real care it only tipped the scales at 170g in the end. Space was at a bit of a premium, through a number of arbitrary design quirks to conjure a certain ‘look’ I cut several millimetres off my nose to spite my face. Being a bit of a squeeze I went with the same 150mah cells as the others as they were small enough to fit without hassle and another malenki nano ESC/RX combo. The armour is just 1mm polycarbonate.
All were finished up before the event, some being a week and some being the evening before but it was probably the most prepared for anything I’ve been in a while, taking my “go ugly, early” approach to building. Just pushing through to do the shitty awkward boring jobs at the start will mean they don’t all get left to the 11th hour. Nobody likes threading, filing and waiting for glue to dry when there’s sexy wiring to do or weapons to fit but they’re all super important and need to happen. I’m probably more guilty than rushing to the pretendobot stage then just checking out because I got the lil dopamine hit too early on.
AWS 64 was a great time for me, while a much smaller turnout than some prior competitions it was about the right size to not feel overwhelming but still provide a brilliant variety of interesting robots (and people!). It was reminiscent of the events when I first started competing with ants back in 2010, just with fewer little bits of paper and shouting to organise the draws.

ReLoader was sadly a bit of a bum note, being drawn up against a cluster it struggled noticeably even to move (despite testing relatively well less than an hour earlier) and was unceremoniously turned off by one of the botlets catching his switch and flicking it off. Unintentional failure mode discovered! It was also really low voltage which is odd but I put down to user error as once the charger was setup to top up my 2s bots I don’t think I remembered to charge ReLoader’s 3s pack. Sadly his second match was against another one of my robots and so I made the decision to forfeit it over Sad Ken. Getting a slight chance for redemption it rumbled around the arena quite happily during the non spinner annihilator and once pitted I could cause a bit of twitchy chaos firing the lifter underneath 3 or 4 other robots. While a bit put out by the showing I have a couple of notes for improvements I want to action over the next few months - just a bit of housekeeping and maybe some fancy new beefcake motors from Turnabot to bring the speed and grunt up to par.
Continuing the theme of damp squib-ness, Sad Ken did not have the best day out either. Practically going backwards, it was shot alongside his jockey. Facing the eventual winner first it was just outgunned with no real chance to spin up and bat them away before being dumped out of the arena then getting a bye taking out my other robot ReLoader. Its final fight in the main competition was against a fast, solid wedge/lifter. Spin up suffered again and I was on the back foot before getting up to speed and knocking a few chunks out before pulling a tombstone and skittling along the floor with my bar in a delightful curve culminating in total inevitable disaster.

Some redemption came in the main annihilator where by sheer luck and grit it managed to stay hanging on till the bitter end. Losing a wheel (fitting for the namesake 3 legged racehorse) and the weapon I was able to hobble and keep some semblance of directed aggression at the other remaining robot. While it eventually lost it was a great spurt of R&D as ‘Ole Saddo could tank hits like a champ, despite the ABS chassis being almost universally regarded as a bit outdated and weak compared to more exotic blends and materials.

The weapon is unfortunately pretty sad, Ken. The epoxy understandably not holding up to out of plane hits and the bearing support having too much flex caused fairly catastrophic problems. However this is actually pretty great as it gives me a solid footing to go forward on to improve it and make it suck less. I already have the flex part sorted with the carbon fibre braces coming soon but the motor is a trickier beast to sort. The stand out thought bubbling over from the ideas cauldron is making it a more traditional hubmotor similar to what you would see on larger robots and changing out the ESC and settings to give it a bit more punch. Potentially taking some weight out of the bar too to aid the system’s spin up time.

Shakma, while doing about as well as the other two pretty much performed as expected with a bit of light shuffling followed by incredible gyroscopic chaos. Its first draw against the hilariously named Bilbo Stabbins had a bit of an over-exuberant gunning of the throttle causing it to tip back onto its blade, acting like a large wheel and sending it hurtling out of the arena. I learned my lesson for the second time and spun up in a more controlled manner but had more or less the same result with a much greater pop and bang as it chucked itself at the roof, the ceiling and the wall, taking chunks out of each. It actually carved a relatively consistent slot in the (new) arena floor so at least my depth of cut was all right, even if my RPM and feed was a touch high. The chassis split in an amusing and not entirely unforeseeable way and that was all she wrote for the robot named after a baboon based horror flick.

Now it seems like it was all a bit gloomy and painfully unsuccessful so far but the silver lining and MVB of the team was undoubtedly HobGoblet. For a chassis on its first revision and a quick throw together of parts it did perfectly. I attribute a lot of this to the broad design stokes I took from other robots of this design yielding an effective and consistent result. Plus having a touch more speed and being such a small robot meant I was able to get out of the fray quickly and easily. Strangely I think this speeding up of the combat actually helped me to stay calmer and hold my nerves better, being able to give myself time to pick engagements. I cut the steering rate down to a fraction so I wasn’t suffering wonton oversteer and constant course correction and for the most part, I could put the robot where I wanted to.

Early on I opted for a lower RPM, expecting engagement to be better and the control of the robot smoother (less gyro) but quickly found that full speed was the way to go and I was able to dish out some respectable hits. I was able to knock Underminer about until they tapped due to mechanical issues which surprised me as I expected to be overpowered immediately.

Buoyed by success I went on to fight an almost comically titanic horizontal spinner from the same team named Gargantua. This did a number on the chassis but I was able to give it back and managed to luck my way to another win. He actually managed to split the chassis at the bulkhead, as well as taking out my consumable printed feeder wedgelets. The split had forced the bulkhead out so that the bearing no longer contacted. Luckily a bit of glue and a mental note to strengthen this area for Mk2 and I was all right to take out the formidable Baphomet driven and built by Dave Weston.

Every fight I was having to do more or less the same repairs, sandwiching the frame back together so the beater ran true and replacing the feeder forks outright. It kept working through and I ended up managing to place 10th which is the best run I’ve ever had!

It was a really nice feeling, especially with that robot as I feel there is a lot of meat on that bone still to pluck and the devil is in the details. Just making it visually similar to other drums and beaters gets you 70% of the way to potential success but it’s the learning curve and the continuous improvement that can lead to better things.
ReLoader will get some work and some reliability issues, Sad ken will get an overhaul but mostly on the weapon end and HobGoblet will have a lot more tweaks with durability in mind. I don’t think it’s the end of the road for Shakma but I think it will get sidelined or recycled for the next competition at least and I’ll try my hand at a different style of walker or maybe even a cluster to keep my hand in.
Until next time spacefans,
Bye xo.
No comments:
Post a Comment